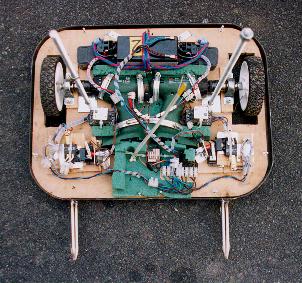
You can see the drills here, lying
on their sides, back to back.
We dispensed with the Bosch 7.2 volt batteries and instead fitted
a 6 ampere hour 12 volt 'gel' battery to drive both motors. The 12
volt battery is at the top, with the yellow "2" label on it.
We do use an original Bosch 7.2 volt battery to drive the
receiver. You can see two here, straddling the 12 volt battery, but
in the final design we used only one.
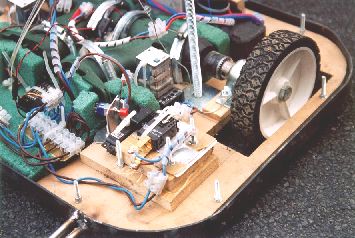
We have not had any overheating problems with any component, in
spite of the higher voltage.
(Click on the picture for a bigger view)
|